Story
Hybrid Model Predictive Control with Physics-Informed Neural Network for Satellite Attitude Control
Key takeaway
Researchers developed a hybrid control system using physics-informed neural networks to more accurately predict and control the orientation of satellites in orbit, which could improve the reliability and performance of satellite-based technologies.
Quick Explainer
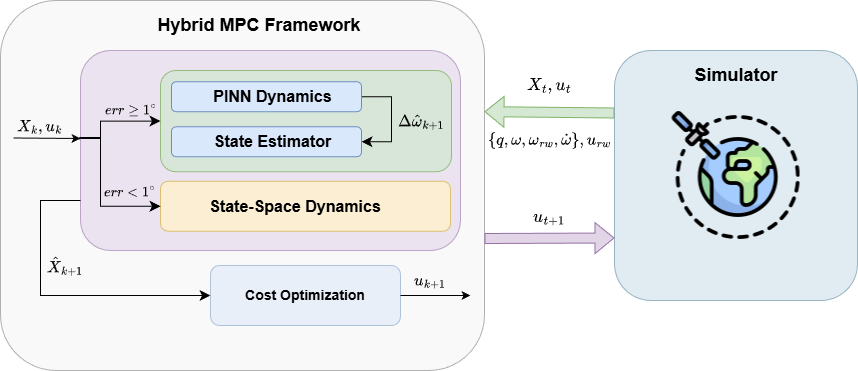
The key idea is to leverage Physics-Informed Neural Networks (PINNs) to model spacecraft attitude dynamics, and then embed these learned dynamics models within a hybrid Model Predictive Control (MPC) framework for improved satellite attitude control. The PINN model is trained on simulation data, with a physics-informed loss function that enforces consistency with the underlying attitude dynamics equations. This hybrid approach combines data-driven learning with physical constraints, enabling more accurate predictions compared to purely data-driven models. The trained PINN is then integrated into the MPC controller, which transitions to a simpler linear model at low attitude errors for better steady-state performance, while maintaining fast convergence under realistic disturbances.
Deep Dive
Technical Deep Dive: Hybrid Model Predictive Control with Physics-Informed Neural Network for Satellite Attitude Control
Overview
This work explores the use of Physics-Informed Neural Networks (PINNs) to model spacecraft attitude dynamics and embed the learned models within a hybrid Model Predictive Control (MPC) framework for improved satellite attitude control. The key contributions are:
- Development of a PINN-based learning framework to model spacecraft attitude dynamics, with a physics-informed loss function that enhances robustness and generalization.
- Systematic comparison of purely data-driven and physics-constrained learning, demonstrating a 68.17% reduction in mean relative error over 10-step recursive prediction horizons.
- Validation of the control relevance of the learned models by embedding them into a hybrid PINN + linear MPC scheme, achieving improved closed-loop performance under realistic disturbances.
Problem & Context
- Reliable spacecraft attitude control depends on accurate prediction of attitude dynamics, particularly for model-based controllers like MPC.
- Obtaining accurate physics-based models for spacecraft with complex dynamics can be difficult, time-consuming, or computationally heavy.
- Learning-based system identification presents a compelling alternative, but models trained exclusively on data often exhibit fragile stability properties and limited extrapolation capability.
- This work proposes a hybrid modeling approach that combines physical knowledge with data-driven learning using PINNs.
Methodology
Satellite Attitude Dynamics
- The dynamics are governed by the spacecraft inertia, reaction wheel inertia, angular velocities, control torques, and external disturbance torques.
- The equations of motion describe the evolution of the spacecraft and reaction wheel angular velocities, as well as the quaternion representation of the attitude.
Neural Network Architecture
- A multilayer perceptron (MLP) neural network is used to learn the spacecraft attitude dynamics.
- The model input includes the spacecraft inertia matrix, current state (satellite and reaction wheel angular velocities), and angular acceleration.
- The network outputs the predicted trajectory of angular velocity changes over a 10-step horizon.
Physics-Informed Training
- The training objective combines a data-driven loss (normalized RMSE of angular velocity prediction) and a physics-informed loss.
- The physics-informed loss regularizes the model by enforcing consistency with the governing attitude dynamics equations, including angular acceleration and angular momentum conservation.
- A Lagrangian dual strategy is used to adaptively adjust the relative importance of the data-driven and physics-informed losses.
Hybrid MPC with Learned Dynamics
- The trained PINN model is integrated into a nonlinear MPC framework to enable attitude control.
- When the attitude error falls below 1 degree, the MPC switches from using the nonlinear PINN model to a linear state-space model for improved steady-state convergence.
- The MPC cost function penalizes attitude error, control effort, and control effort variation.
Data & Experimental Setup
- The dataset is generated using high-fidelity numerical simulations in the Basilisk framework, considering a cubesat in Low Earth Orbit actuated by reaction wheels and subjected to environmental disturbances.
- The dataset includes 300 nominal simulations and an additional 50 simulations with parameter variations (±10% in satellite mass and inertia).
- The neural network models are trained and evaluated on this dataset, with a 67-33% split for training and validation.
- Comparison is made against two traditional MPC baselines: a linear state-space MPC and a nonlinear MPC.
- Evaluation is performed through 300 Monte Carlo simulations, introducing state estimation noise, parameter uncertainty, and reaction wheel friction.
Results
Attitude Dynamics Regressor
- The physics-informed model (MLP-LD) achieves a 68.17% reduction in mean relative error compared to the purely data-driven model (MLP-DD) for 10-step recursive predictions.
- The improvements in both mean relative error and physics-informed loss are statistically significant.
MPC Controllers
- The hybrid MPC scheme (MLP-LD + Linear) outperforms the purely nonlinear MPC and linear MPC in terms of settling time, reducing it by 61.52%-76.42% under the tested noise and uncertainty conditions.
- The hybrid MPC achieves comparable steady-state error to the linear MPC, but requires significantly higher reaction wheel torques.
Interpretation
- Embedding physical constraints into the neural network training process through the physics-informed loss function substantially enhances the model's predictive accuracy and control-relevant properties.
- The hybrid MPC framework, which transitions from the nonlinear PINN model to a linear state-space model at low attitude errors, achieves the best overall performance, balancing fast convergence and low steady-state error.
- The higher reaction wheel torques required by the hybrid MPC suggest a trade-off between control effort and convergence speed that could be further explored.
Limitations & Uncertainties
- The dataset, while comprehensive, is still limited to a specific cubesat platform and set of disturbances. Extrapolation to more complex spacecraft or environments may require further validation.
- The study focuses on rest-to-rest maneuvers; the performance of the learned models and hybrid MPC may differ for more complex attitude trajectories.
- The experiments consider parameter uncertainties up to 20%, but real-world spacecraft may experience larger variations over their lifetime.
What Comes Next
- Extending the framework to handle more complex spacecraft dynamics, such as flexible appendages or non-rigid bodies.
- Exploring the use of PINNs for modeling discontinuous dynamics, partial observability, and restricted actuation, as encountered in satellite berthing or docking with non-cooperative targets.
- Investigating the trade-offs between control effort and convergence speed in the hybrid MPC formulation, potentially through multi-objective optimization.
- Validating the approach on real-world hardware-in-the-loop experiments or actual spacecraft missions.