Story
Conditional Flow Matching for Continuous Anomaly Detection in Autonomous Driving on a Manifold-Aware Spectral Space
Key takeaway
Researchers developed a new method to help self-driving cars continuously detect and avoid rare, risky situations, improving safety for autonomous vehicles.
Quick Explainer
Deep-Flow is an unsupervised framework that uses Optimal Transport Conditional Flow Matching to characterize the continuous probability density of expert human driving behavior on a low-rank spectral manifold. By combining goal-conditioned scene encoding and a kinematic complexity weighting scheme, Deep-Flow can reliably identify safety-critical anomalies that violate the learned "safety manifold", even if they satisfy traditional kinematic thresholds. This provides a mathematically rigorous, physics-aware density estimate that serves as a continuous, deterministic safety metric for large-scale fleet validation of autonomous vehicles.
Deep Dive
Technical Deep Dive: Conditional Flow Matching for Continuous Anomaly Detection in Autonomous Driving
Overview
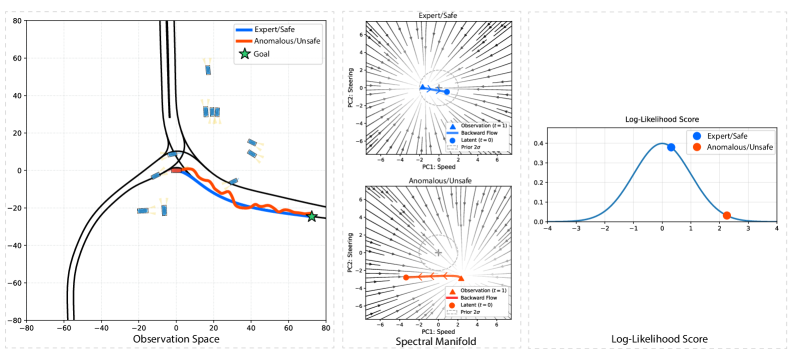
This work presents Deep-Flow, an unsupervised framework for safety-critical anomaly detection in autonomous driving. It utilizes Optimal Transport Conditional Flow Matching (OT-CFM) to characterize the continuous probability density of expert human driving behavior. Deep-Flow operates on a low-rank spectral manifold and combines goal-conditioned scene encoding with a kinematic complexity weighting scheme to ensure robust learning of safety-critical maneuvers.
Problem & Context
- Safety validation for Level 4 autonomous vehicles (AVs) is bottlenecked by the inability to scale the detection of rare, high-risk "long-tail" scenarios using traditional rule-based heuristics.
- Current safety validation pipelines rely on kinematic thresholds (e.g. deceleration, Time-to-Collision) that are brittle and blind to semantic anomalies like lane violations or aggressive social interactions.
- Existing generative models for trajectory prediction suffer from issues like exposure bias, temporal drift, or posterior collapse, making them unsuitable for reliable density estimation required for safety validation.
Methodology
Spectral Manifold Representation
- Trajectories are projected into a low-rank (k=12) spectral coefficient space using Principal Component Analysis (PCA).
- This enforces kinematic smoothness, enables stable Jacobian trace computation for likelihood estimation, and reduces the dimensionality for tractable inference.
Goal-Conditioned Scene Encoding
- An early-fusion transformer encoder processes heterogeneous scene context (agent histories, map topology, traffic signals) and injects the goal lane geometry via a direct skip-connection.
- This resolves multi-modal ambiguity at complex junctions and maintains the integrity of the navigation intent throughout the network.
Optimal Transport Conditional Flow Matching
- Deep-Flow learns a time-dependent vector field that defines a bijective mapping between a Gaussian prior and the complex distribution of expert spectral coefficients.
- The straight-line trajectories inherent to OT-CFM ensure numerical stability during backward integration for exact log-likelihood computation.
Kinematic Complexity Weighting
- A physics-informed importance sampling scheme based on path tortuosity and jerk energy forces the model to prioritize the learning of high-energy, safety-relevant maneuvers.
Data & Experimental Setup
- The Waymo Open Motion Dataset (WOMD) is used for evaluation, with 250,000 training and 8,856 validation scenarios.
- A "Golden Test Set" of safety-critical events is curated using heuristics on extreme deceleration and dynamic instability.
- Deep-Flow is implemented in PyTorch and trained on a single NVIDIA GeForce RTX 3090.
Results
- Deep-Flow achieves an AUC-ROC of 0.766 on the Golden Test Set, significantly outperforming a random baseline and discrete kinematic heuristics.
- Analysis reveals a fundamental distinction between kinematic danger and semantic non-compliance, with Deep-Flow identifying a "predictability gap" by surfacing geometric violations and erratic maneuvers that traditional safety filters overlook.
- The likelihood distribution exhibits a bimodal structure, with safety-critical anomalies strictly excluded from the high-likelihood expert manifold. This provides a robust foundation for threshold-based safety monitoring.
Interpretation
- Deep-Flow acts as a high-precision "Behavioral Auditor", surfacing semantic violations like lane boundary crossings or aggressive cut-ins that are mechanically safe but socially out-of-distribution.
- The learned spectral manifold provides a mathematically rigorous, physics-aware density estimate that can serve as a continuous, deterministic safety metric for large-scale fleet validation.
- By identifying the "Safety Ceiling" where critical events are statistically excluded, Deep-Flow enables the construction of objective, data-driven safety gates for autonomous deployment.
Limitations & Uncertainties
- The linear spectral manifold occasionally introduces "stiff" path artifacts in high-curvature environments, suggesting the need for more expressive non-linear latent representations.
- While Deep-Flow excels at identifying semantic anomalies, its performance on pure kinematic danger may be limited compared to specialized rule-based heuristics. A hybrid approach leveraging both signals could provide the most comprehensive safety validation.
What Comes Next
- Integrating a Social Force Field or Signed Distance Field directly into the Flow Matching loss could enable the learning of a "Social Manifold" that is both geometrically compliant and socially aware.
- Exploring non-linear manifold learning via Variational Autoencoders or Vector-Quantized latents could increase geometric fidelity without sacrificing the numerical stability required for ODE-based inference.
- Combining the probabilistic safety signal from Deep-Flow with traditional kinematic thresholds could provide a more holistic solution for autonomous driving validation.