Story
Estimating Human Muscular Fatigue in Dynamic Collaborative Robotic Tasks with Learning-Based Models
Key takeaway
Researchers developed a way to measure muscle fatigue in people working with robots, which could help make human-robot collaboration safer and more efficient.
Quick Explainer
This study presents a learning-based approach to continuously track human muscular fatigue during dynamic physical human-robot interaction tasks. The method uses subject-specific machine learning and deep learning models to estimate the fraction of cycles to fatigue from surface electromyography signals. Unlike previous classification-based techniques, this regression formulation enables real-time monitoring of physiological changes, which is crucial for enabling timely interventions and adaptive robotic control. The key innovation is the use of data-driven models that can generalize across different movement tasks, in contrast to prior methods that relied on task-specific thresholds or muscle activation patterns.
Deep Dive
Technical Deep Dive: Estimating Human Muscular Fatigue in Dynamic Collaborative Robotic Tasks
Overview
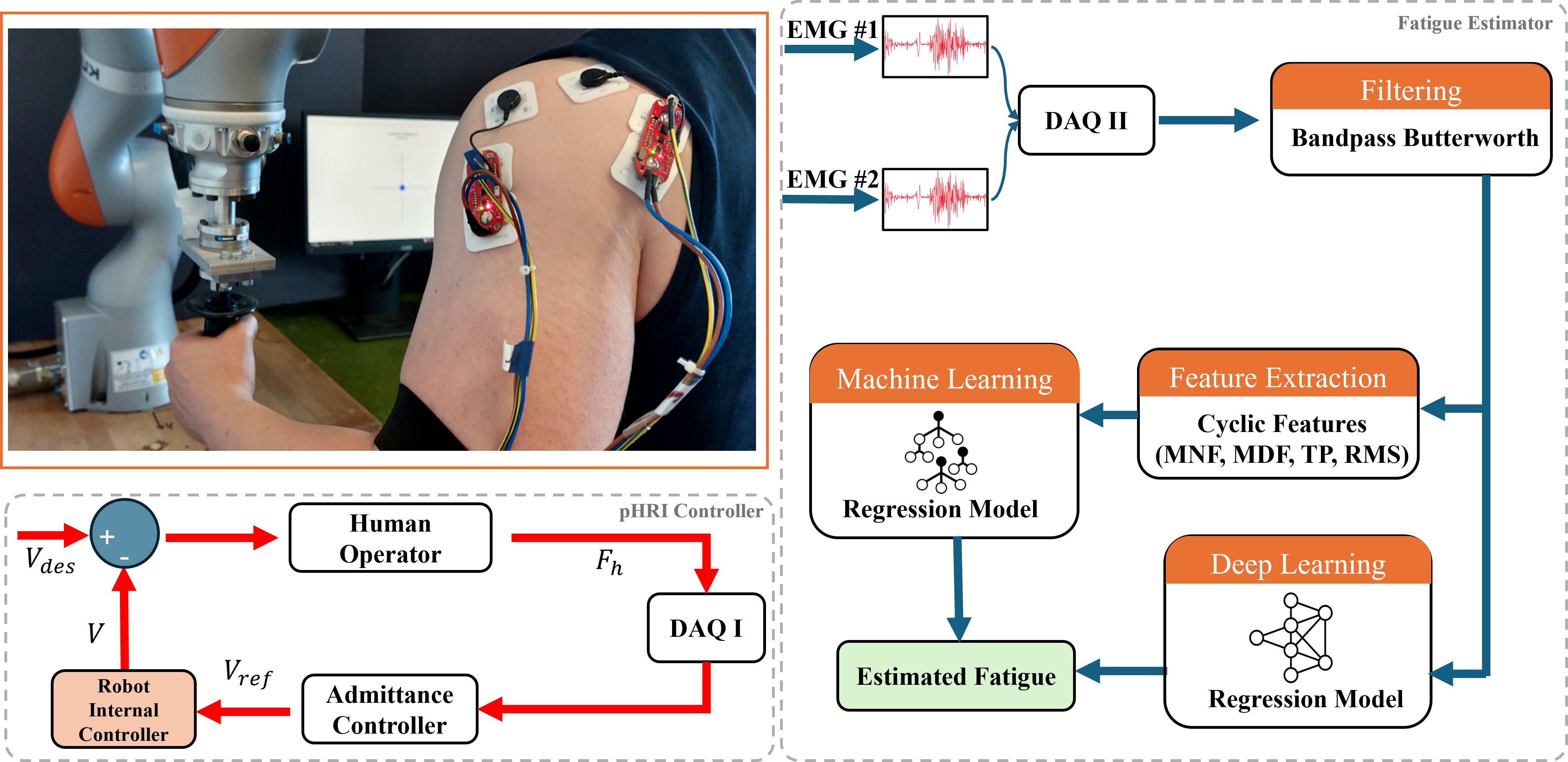
This study introduces a learning-based approach to estimate the progression of human muscular fatigue in dynamic physical human-robot interaction (pHRI) tasks. The method uses subject-specific machine learning (ML) and deep learning (DL) regression models to predict the fraction of cycles to fatigue (FCF) from surface electromyography (sEMG) signals. Unlike previous classification-based approaches, this regression formulation enables continuous tracking of physiological changes, which is critical for timely intervention and adaptive control in dynamic tasks.
Methodology
- Participants performed cyclic left-right movements with a collaborative robot under two different admittance damping conditions.
- sEMG signals were recorded from the lateral deltoid (LD) and posterior deltoid (PD) muscles.
- Frequency-domain (mean/median frequency, total power) and time-domain (RMS amplitude) EMG features were extracted per cycle.
- Subject-specific ML regression models (Random Forest, XGBoost, Linear Regression) and a DL CNN model were trained to estimate the FCF.
- Cross-task generalization was evaluated on vertical and circular movement tasks.
Results
- EMG features showed systematic changes with fatigue progression, with decreasing mean/median frequency and increasing RMS and total power.
- The CNN model achieved the lowest average root mean square error (RMSE) of 20.8% in FCF estimation, followed by Random Forest (23.3%), XGBoost (24.8%), and Linear Regression (26.9%).
- The ML models generalized well to the unseen vertical and circular movement tasks, with RMSE below 25%, while the Linear Regression model performed poorly.
Limitations & Uncertainties
- The dataset was limited to a specific participant demographic (university students).
- The models assume homogeneous fatigue progression across muscles, although activation patterns may differ.
- Integrating EMG with kinematics and force data could improve fatigue estimation.
- Longitudinal validation in real-world scenarios (manufacturing, rehabilitation) is needed.
Future Work
- Develop hybrid models combining data-driven methods and musculoskeletal simulations.
- Evaluate robustness across diverse tasks, body segments, and populations.
- Implement closed-loop robotic controllers that adapt based on real-time fatigue estimates.
Sources: